Pada lesson ini, proyek akan menggunakan servo control dan cara mengatur 1 servo menggunakan potentiometer.
Komponen
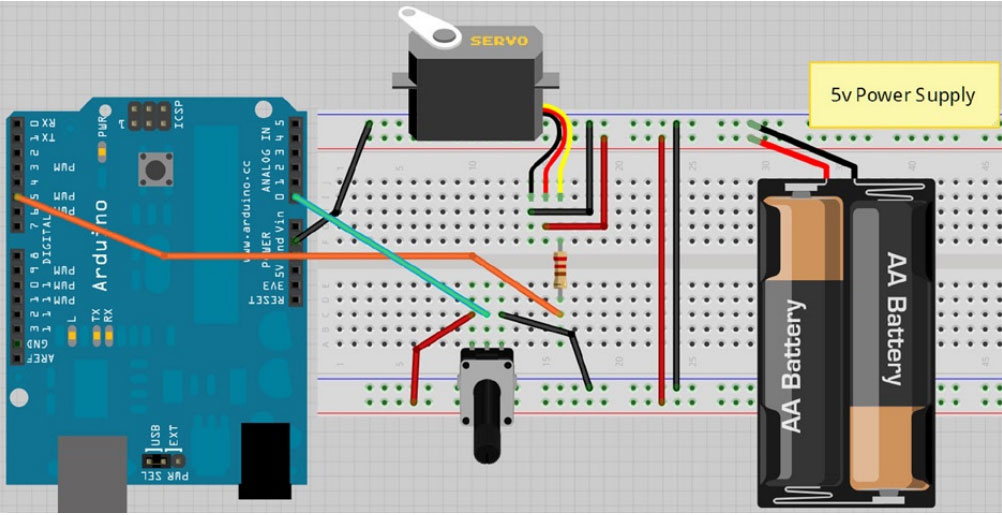
- Standard RC Servo
- Rotary Potentiometer
- 220 ohm resistor
Skema
Sketch
#include <Servo.h>
Servo servo1;
void setup(){
servo1.attach(5);
}
void loop(){
int angle = analogRead(0); // Read the pot value
angle=map(angle, 0, 1023, 0, 180);
servo1.write(angle); // Write the angle to the servo
delay(15); // Delay of 15ms to allow servo to reach position
}
Pembahasan Sketch
Pertama include library pendukung untuk mengatur servo
#include <Servo.h>
Kemudian deklarasi objek servo
Servo servo1; // Create a servo object
Pada fungsi loop, attach servo1 pada pin 5
servo1.attach(5);
Perintah attach untuk mengatur pin yang digunakan. Pada sketch digunakan satu parameter saja, yaitu pin. Perintah attach bisa menerima 3 parameter, pin, sudut minimum (0 derajat) (default adalah 544), dan sudut maksimum (180 derajat) (default adalah 2400).
Untuk kebutuhan umum, cukup menggunakan 1 parameter saja, yaitu parameter pin.
Perhatian Library ini mendisable fungsi analogWrite (PWM) function pada pin 9 dan 10. Pada Arduino Mega kita dapat menggunakan 12 motors tanpa menginterfensi fungsi PWM.
Pada main loop, baca nilai analog dari potentiometer yang terhubung ke pin analog 0.
int angle = analogRead(0); // Read the pot value
Petakan nilai input dari potentiometer pada jangkauan 0 -180, dimana akan mengubah sudut dari lengan servo.
angle=map(angle, 0, 1023, 0, 180);
Setelah diketahui nilai sudut, perintahkan servo untuk mengubah lengannya ke sudut tersebut.
servo1.write(angle); // Write the angle to the servo
Kemudian delay 15 ms untuk memberi waktu bagi servo menggerakan keposisi yang diperintahkan.
delay(15); // Delay of 15ms to allow servo to reach position
Sebagai tambahan, kita dapat menggunakan perintah detach() servo dari pin, hingga pin dapat untuk keperluan lainnya. Atau kita juga bisa menggunakan perintah read() untuk membaca sudut saat ini.
Untuk lebih lanjut mengenai library servo, bisa dibaca di http://arduino.cc/en/Reference/Servo.